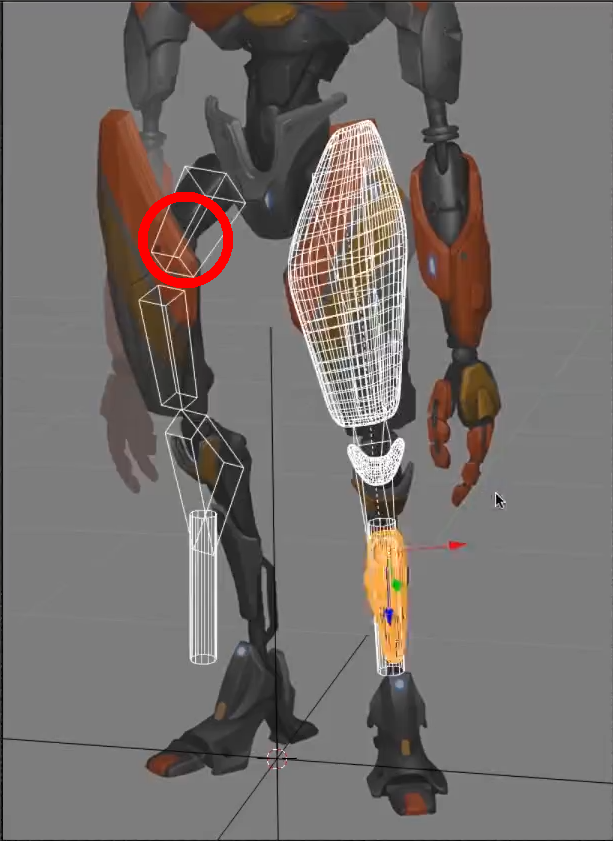
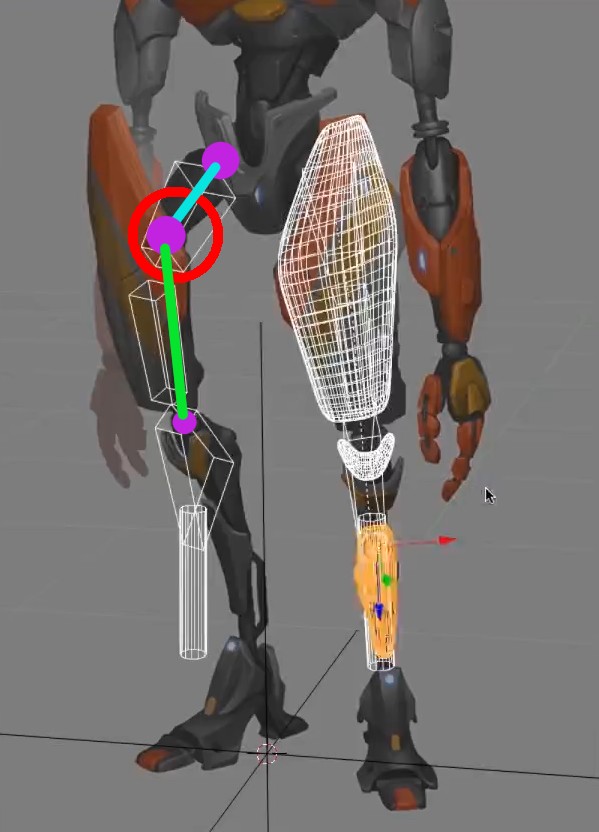
I'm wondering whether the length of the upper half of the robot's right thigh is correct or whether it should be shorter. If I'm right, then the hinge between the two parts of the robot's right thigh is partly visible behind the thigh guard (red circle). But if I model it like this, then I get a relatively big gap between the two thigh parts. Furthermore, I would have rotated the upper thigh a little bit more outwards. Certainly the tapering of that part can be a little bit confusing in conjunction with the perspective foreshortening.