Hi there,
Here's the scenario: a chain that will eventually be attached to something on the top. It has a weight at the bottom that will get hit and then get a pendulum effect.
The first link is set to Passive, the others are active. All of them have the Shape of collision set to mesh, so it should theoretically respect the fact that they are sealed meshes on one another, or do I understand that wrong?
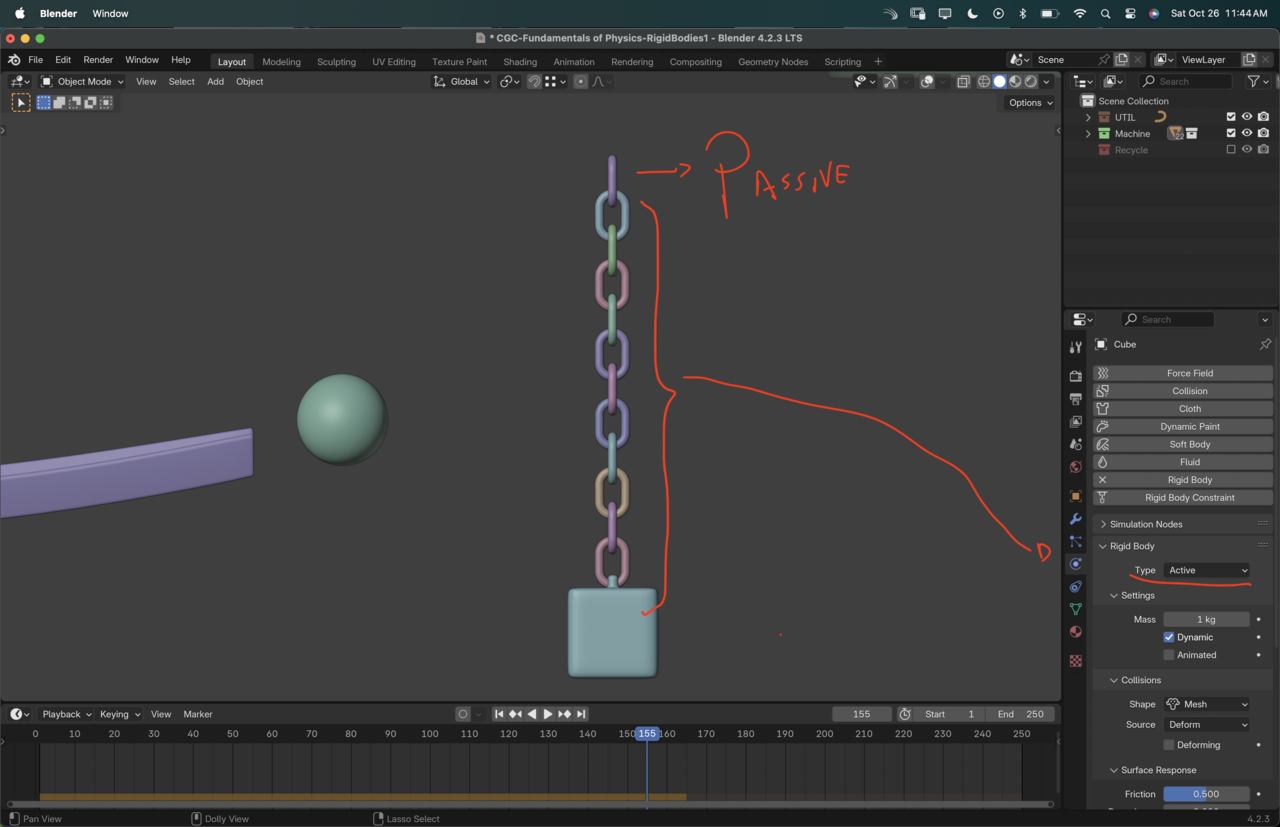
Same with the cube at the bottom: set to active/mesh... but for some reason when the ball hits the cube the chain gets loose from the top link, and the cube breaks free from the chain 🤔
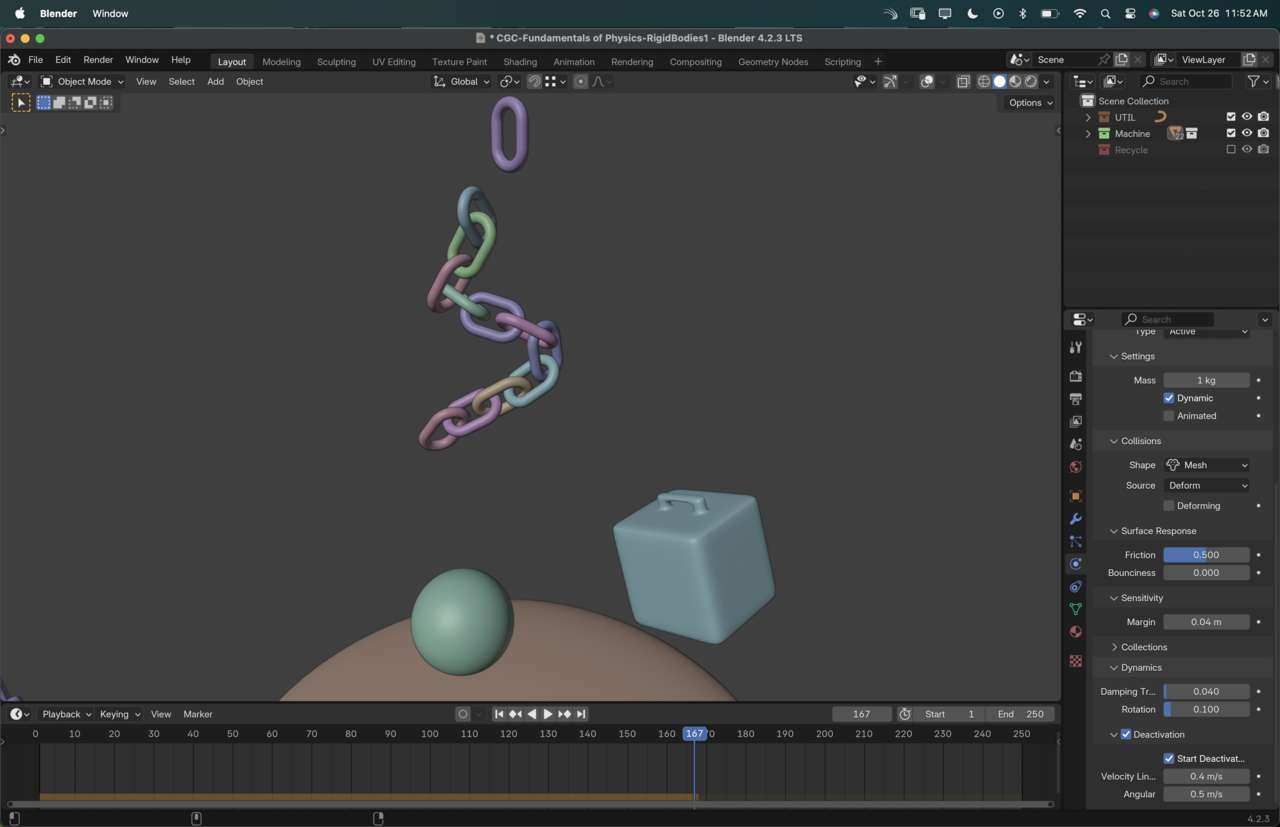
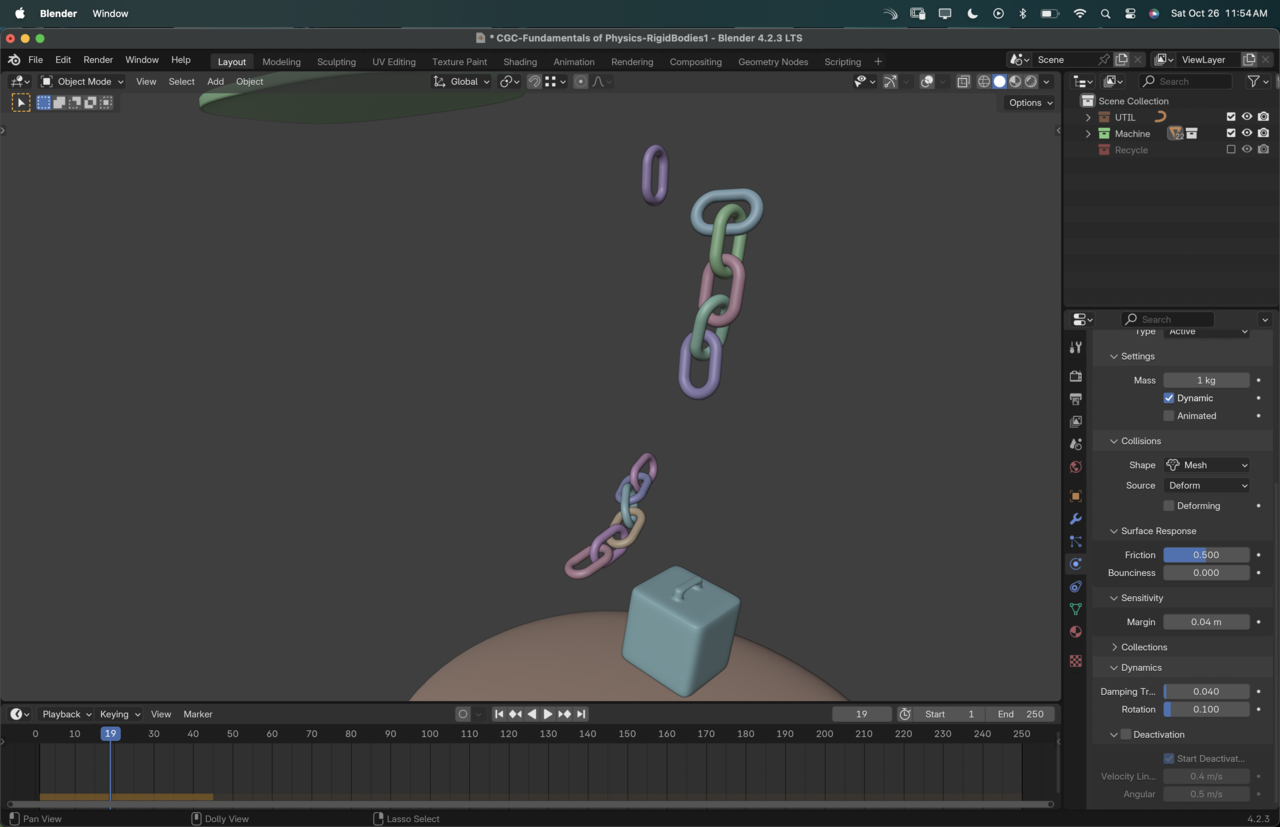
Only other setting I have touched is to start deactivated. If I don't it is even crazier of a result because the links start "bouncing" on their own from frame 1, before the ball even gets there. And the chain break is even worse, happening at multiple points.
What am I missing for this effect?
I managed to make it not break by scaling everything up, adding a fixed constraint between the first and second link, then another between the last and the weight. Increasing everything's friction to 1, considerably increasing the weight of the weight, and decreasing the weights' margin sensitivity.
Let me know if that's the way to go about it: a lot of testing, a lot of scaling, and surely a whole lot of saving 😅 . Or if you have a smarter way to achieve that.
1. It could be the space between your links. Your margin is .04m or 4CM about 3/4 of an inch. If the mesh is inside of the the margin when the simulation start it will do funky things like jump outside or go flying off. Since it's solid links you might want to change the source to base instead of deform.(I have to do this to reduce CPU usage, but I'm on an old system...or I was. I haven't done rigid body since I got my new computer a couple of weeks ago. You will probably need to make the loop/handle/link of the cube have more space for the chain link to fit into.
2. Local origin. Make sure that each links origin is in the center of the link. It seem logical to put it at the top of the link but that causes so many weird glitches. After discovering this I now just use right click->set origin->Origin to geometry.
Thank you Dwayne! I did have the origins local to each object, but did not think the proximity of the links would be that much of an issue. Thank you for the tips!
Scaling it up definitely helped overall, and I ended up ditching the bottom weight so it would make more sense on my "track". The idea was that it would offset the plank atop and make it tilt, but between having the links+weight behaving a little weird, and that I couldn't figure out how to make the plank behave passively until the weight would tilt it... I ended up just checking "animated" and added two keyframes.
Overall it's quite impressive how much we can accomplish with so little keyframes. I have a course with 10 to 14 steps going on and 4 keyframes total. Amazing!