Here's where I'm at now with rigging Noodlehead.
There's still a bit to go. I initially tried doing the cables underneath but it turned into a nightmare, so I'm leaving it for later.
Otherwise I have, for the most part, finished the legs.
The second half of the video is where I'm demonstrating the different walk profiles that I have set up. As I change between the three options, it adjusts how the IK chain, and the camber roll operates. There are aspects of each of them that I like, and I'm exploring what works best and how to fix what doesn't. One of which causes the camber mesh to fall out of it's ball socket (That'll require fixing the mesh, or using weight painting as opposed to directly linking the mesh to a bone).
What I do like about having different walk profiles is that I can essentially make Noodlehead walk in different styles - and It's something I'll have a go with when it comes to animating to see if it works (or not at all).
I'm having a good deal of fun with it, and it's feeling rewarding! I'll post up when I get further!
Also tagging @waylow so you can see too!
Cheers!
Dude, this is great!
I love seeing when people successfully apply what that have learned to their own projects.
And it looks like you are having a lot of fun at the same time. This means you are doing something right - keep it up.
I have a couple notes for you to think about.
Firstly, on the legs...
Try not to overthink what an animator will want or need to do.
They will most likely just have it set 1 way and work with that, but only require a change in behaviour of the joint section if they are doing something specific (and close up to the camera)
So having multiple 'walk profiles' is probably adding unnecessary complexity. Having that joint automatically work in a way that works for 99% of situations out of the box is perfect. (but then having the ability to hand animate that segment, or switch it 1 alternate behaviour is more that enough)
I’m guessing it’s more of a learning task for you (which is awesome), but you don’t want to focus all your energy designing the elaborate switching system that no one will even touch haha. (don’t worry, I’ve been there!)
Next, with the Knee poles. You probably want to parent them to their respective foot controls. That way it’s less work to animate. You could set up parent switching on those, but really that’s overkill as well. 1 parent is fine, and the animators can deal with the 1 situation in 1 million where they need different behaviour.
And with the antenna, you probably want that stretchy chain to sit below simple FK controls. And then have those FK controls automatically rotate with the translation (or rotation) of a master control. That way you will have 1 main bone to control each antenna wobbling around.
Animating the end seems like it might be better – but in the long run it’s harder to animate.
That should be enough information for you to start brainstorming a solution for what I have described, but if you get stuck and need me to point you in the right direction – just give me a nudge,
But really excellent work man. I’m going to get Kent’s eyes on this for the Student Showcase.
High five to you.
Thanks Wayne!
I'll quickly jump into a quick question before responding to the rest of your notes.
This is all without having experimented yet, and I'll get to it after I send this message. But I thought I'd give a heads up where I'm going with it.
I mentioned that the cables underneath Noodlehead were posing to be rather tricky for me during my first attempt at them. The main reason is getting them to bend and stretch with the legs correctly - the mesh was distorting in all kinds of unappealing ways. I'm adding a screenshot of the cables that will need to interact with eachother to some degree.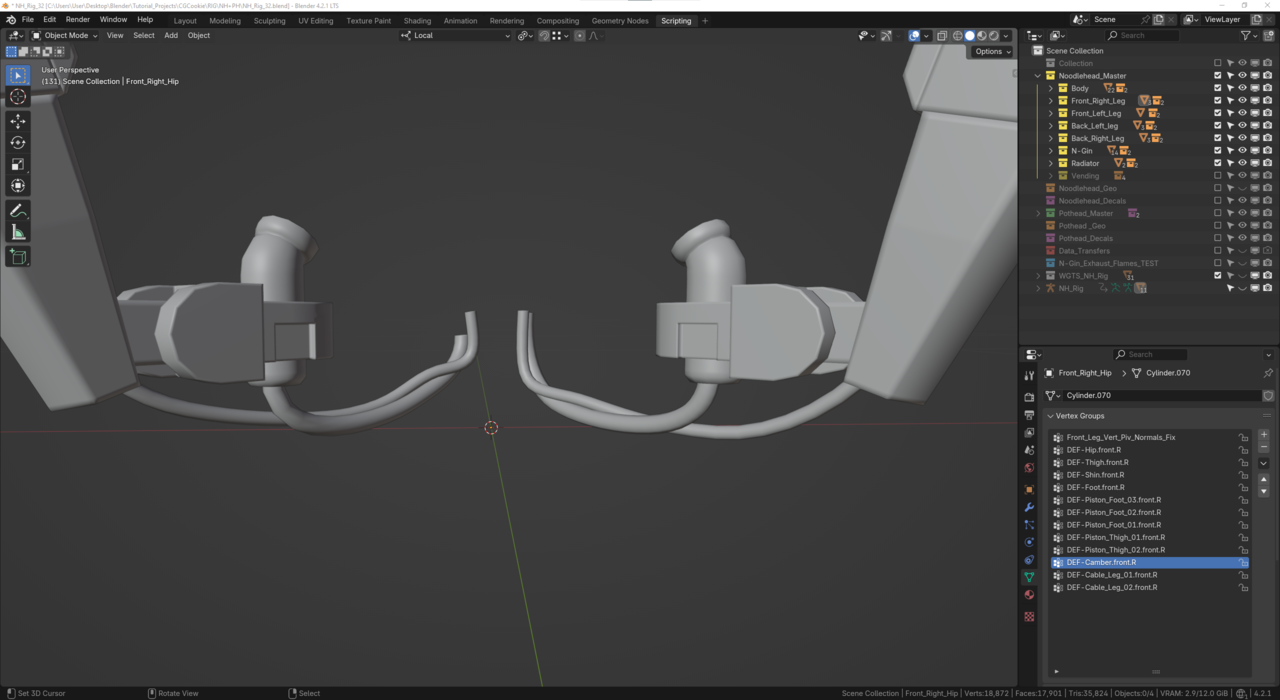
You can see that the ones ontop are, well, sitting ontop of, or 'looping' over the others. It would be easy enough to bone them up, but getting the mesh to not clip might prove tricky (tbh, I won't know until animating them). I was thinking I could create tweak bones to adjust them as they move? My only concern (again, on having not animated yet) is that it could unintentionally look like a spaghetti monster having a dance party. (Again pt.2, I assume it's up to the animator to do a good job and not have dance parties underneath robots)
I was on a discord call with Phil Osterbauer and a member called John the other day, and they suggested I try a spline IK setup?
I have a suspicion I'm falling back down the path of overcomplicating things by trying to get these cables to automatically follow the legs without having to do any animating on them>
Additionally, and you've mentioned this to me before, but it is a riggers nightmare to have to rig a posed model. Would these cables be considered "posed". Ie, could a workaround be that I straighten the mesh (see the rough sketch below where the blue lines are the straight cables) and add my bones, and then move them into place with pose mode and then apply the pose as the rested pose?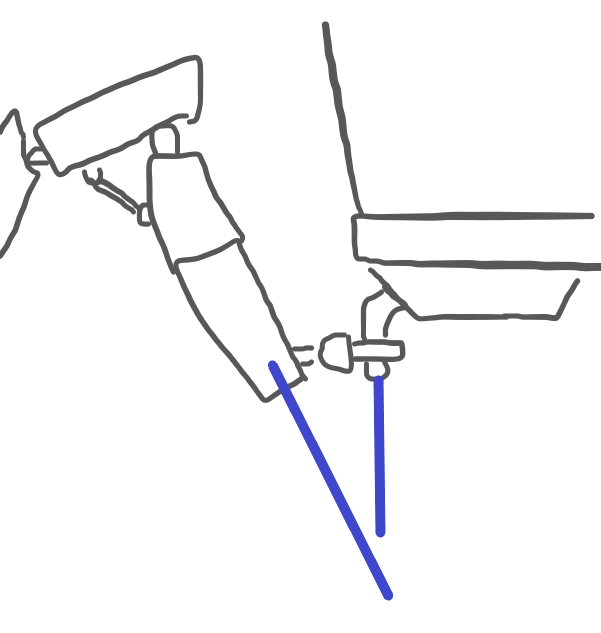
(edit: I did a very quick test, and while it applied the bones to the rest pose, the mesh jumped back to it's initial state so I'm not sure if this would work?).
I'll start trying things out and report back with how I go. My initial attempts with the "super bendy" and "bendy chain with twist" setups sort of worked. But when the last bone (attached to a leg - so in that case it would have been a MCH rather than a control bone) moved, it only moved the end section of the cable as opposed to moving the majority of it.
Aside from the cables:
For the legs:
I understand what you're saying about not adding unecessary controls. I'll pick my favourite walk profile and work with it so it fulfills the %99 of situations (with a minor optional behaviour alternative if it works).
For the knee poles:
I'll admit, I was translating the Luna setup from the IK/FK arm schematic thinking it would be better as the other leg schem has all the heel/roll/toe etc bone setups. Perhaps I was intimidated by it and thought to shy away. But I'll have another go and see how it works. I can't imagine toe spin would work on something that has no toes (haha). *brainwave thinking aloud moment* - Adding in heel banking might actually create a solution to where I don't need to create different walk profiles. In the video I was demonstrating how the Camber bone/mesh rotates when I change the walk profile custom property. But I think I could set up heel banking to allow the camber to roll on it's y-axis?
And the Antenna controls:
I think I follow what you're saying. I made it with the Bendy Stretchy Rig thinking it would be enough. But adding FK controls (and tweaks) would give more control over it. Would I constrain the FK bones to a master control and adjust the influence so that they sequentially decrease in INF value starting from the master going down - similiar to Luna's palm bone setup?
Anywho, cheers for the wise words!
@waylow a quick question about IK's. Is it (if not imperative) at least ideal to have a pole vector when setting up an IK chain? I remember you mentioning the usefulness of them in the Core course, but can't recal if you said how vital they are.
I'm trying different ways of setting up my legs (not my legs, but Noodleheads), and I like the way they move without a knee pole. I have however come across an interesting situation where due to the way the bones are positioned, the rotation of the Foot IK doesn't align with the rest of the chain. Ie: I'll rotate the foot widget 90 degs on the Y, but the rest of the chain will only rotate as far as the chain allows it, and not 90 to match the widget. I'll post some screenshots tomorrow morning before I head off to work (or if the file is tidy enough, I'll upload it via a dropbox link if you'd like to dig around).
Secondly, is it common to see multiple IK constraints in a leg that has more components than the average foot-shin-thigh number of three? The back legs of Noodlhead have five, possibly 7 depending how I resolve things. Sorry again, not at my comp to add photos until tomo morning, but these renders might help for now just to show what I mean. I'm wondering if I could benefit from adding multiple IK constraints given the length of the chain and the angles at which each subsequent bone differs from the last, or if it might make things muddy instead. I'll give it a go next time I jump on either way.
Cheers!