Tagging @waylow to say g'day. PS I'll reply to the video response you sent in regards to my final Luna submission asap - I had a couple specific Q's and wanted to clarify the stuff with the party hat (hehe). It's been on my cards. I just haven't gotten to it yet sorry!
But, I'm playing around with the IK bone properties tab. Under Inverse Kinematics we have the ability to lock the axis and apply stiffness to them, as well as set the parameters for the min/max rotation. This stuff wasn't covered in either the Core, or RIG courses (Aside from the IK stretch) Unless it was and I wasn't paying attention?
Is it either because it was out of the scope of/not relevant to the course, or lesson. Or is there a chance it could allude to funky animation? If feel it could have been handy to apply them to the crane and turret rig exercises?
I'm applying the min/max IK rotation to parts on my robot's leg where it would otherwise cause the mesh to clip through other mesh. I also feel that it creates the desired motion of how the chain parts would move (ie. part A of the robot leg only rotates so far and stops before the mesh clips).
TLDR: Should I be wary with playing with these settings and what implications (if any) could arise from them? Or is it cool bananas to set them up? OR (sorry another one), should I explore setting up constraints to set the parameters instead?
Cheers!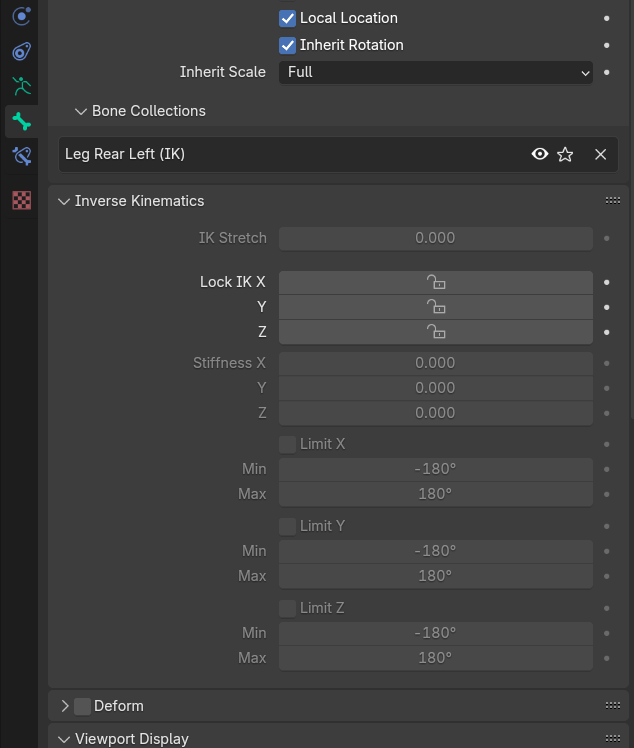
While I'm at it, this would probably be done with constraints instead of using the afformentioned IK properties tab options, but is there a way to "soften" the abrupt stop of an IK bone reaching it's min/max rotation?
I'm thinking aloud here, but could I use a *insert constraint* to drive the stiffness value (possibly with the driver graph editor), so as it approaches it's min/max it slows down before reaching said min/max?
Or possibly even use the rotation of the bone itself to drive the stiffness - EG: if IK BONE_01 is locked to only rotate on it's X axis, could I use it's rotation as a driver along with the graph editor to essentially decelerate the rotation?
Currently when I move the Foot_IK, parts of the chain abruptly stop when they reach their min/max rotation. I'm not sure how otherwise this would be prevented while using an IK setup.
Alternatively, am I potentially just over complicating my rig setup by trying to do this?
Those settings are generally used for mechanical IK. Which I think you've already figured out based on how you describe your use case. As for the slowing down instead of an abrupt stop, that is more of the animators job. You're overly complicating your rig. Also animators usually like to have more freedom with a rig than it to be locked down. With that said, yes play around and definitely try out your ideas on having the rig slow it down and other ideas you come up with. In rigging community this is called playgrounding or prototyping. You may not need it or use it for this rig, but it will lead to learning and building a foundation of knowledge that can be used in other situations. Plus if your the animator then you may want to do both methods(rigged and animated) to get a feel for what animators what a rig to do.
"As for the slowing down instead of an abrupt stop, that is more of the animators job. You're overly complicating your rig. Also animators usually like to have more freedom with a rig than it to be locked down."
I had a feeling that'd be the case.
I'll keep the locked IK axes on as that does the trick (I can't remember if it also locks it in the transform panel - I'll have to check when I get home tonight). (Edit: everything in the chain isn't a control bone so there'd be no point in changing the transform n-panel locks tbh)
I like your thoughts on having both a restricted and free rig - I figure I could create a custom prop to turn them on and off.
As I've not actually dived into any animation yet (other than my first experiment with it from the 4.X basics course). But I imagine as I do, I'll get a sense for how to improve my rigs. I also love the term playgrounding, hah!
Cheers Dwayne
Yes, definitely do some animating. Rigging is all about making animators look good...I mean making their jobs easier. By doing some animating you will have a better sense of what animators need. I wish I could take credit for the term Playgrounding, but I've heard it and read it in several rigging communities. I can't remember the first time I heard it. I think it was either Dan Pro youtube channel or in The Humane Rigging series which is a great series in my opinion. Even thought it's a very old version of Blender.
Hi Harris,
Yes Dwayne is spot on (I feel like I say that nearly every day haha)
Personally I don't use the locks, stiffness or limiting of the range of motion. I use constraints for this - as I feel it's 1 less thing to have to learn and worry about.
It's like the "inherit rotation" checkbox. I used to use this a lot when I first started rigging. But now I think it is much smarter to use constraints for this. Less to think about plus you can visually see that the bone is being affected and know it's a constraint. (the checkbox means you have to go digging to see this)
As for the freedom aspect - yes yes yes
You want to leave things open for the animators where ever possible - only lock it down if it breaks the rig. If they make the rig look bad when it's possible for it to look good - that is totally on them haha.
But having the freedom to do things that you didn't think an animator would need to do is helpful. Animators can find really clever solutions to problems, but if you lock stuff down because "it physically shouldn't do that", then you are more likely to have a rig sent back to you so that you can implement a solution for them. (which usually means removing that stuff you added to 'protect' them)
As for the abrupt stopping on the IK chain - that is a known issue with IK. It's a mathematical property with geometry.
Mathematical explanation:
Do you remember Tan for maths class?
Do you remember what it looks like?

Do you see how the curve flies off to +- infinity at all those asymptotes?
Imagine you are moving the IK control at a constant speed. The 'knee' will increase in speed as it gets straighter and straighter (even though the control is moving at a constant rate).
Therefore the knee's acceleration approaches infinity the straighter the leg gets.
Normal person explanation:
The knee will pop.
You might see some "soft-IK" solutions to mitigate this, but that just alters the way the deformation bone follows the control (it will loosen control as it gets straighter)
That might sound cool, but really it means the Foot isn't where you want it to be so you have to animate it past that point because it starts to lag behind.
So if you need to deal with a popping knee, or a foot that isn't where you put it - which one is better?
Personal preference.
Anyway - this was much more that I wanted to write, and I even got Pythagoras involved. What.
Hope this helped.
@waylow In all fairness I did learn a lot from your first Fundamentals of rigging and CORE: Fundamentals of Rigging. I still need to go back and finish RIG.
@waylow blimey! Yeah, I'm working on not overcomplicating things - I'll gradually learn where to draw the line as I continue to rig (and animate).
I have removed the locked axis and rotation restrictions in the IK panel and am currently playing with different constraints to see what I can make it otherwise do. I have also been adjusting the location/orientation of the IK poles and have found a few different variations for what I like and might experiment with setting customs props to switch between different pole set ups. I've found that while swinging my IK feet around I'm appearing to get what look like different styles of walking when I have the pole located/orientated in various ways. I might lean into this and see what comes out of it. I won't too go into it now because I'll be unloading a can of worms - I'll save it for when I have videos or files I can share to visually demonstrate where I'm at.
In regards to the maths stuff, I think I get the gist!
I'll keep working and let you know how I go!
Cheers!