Hi all,
I am trying to rig a robot arm and there is something I can't figure out.

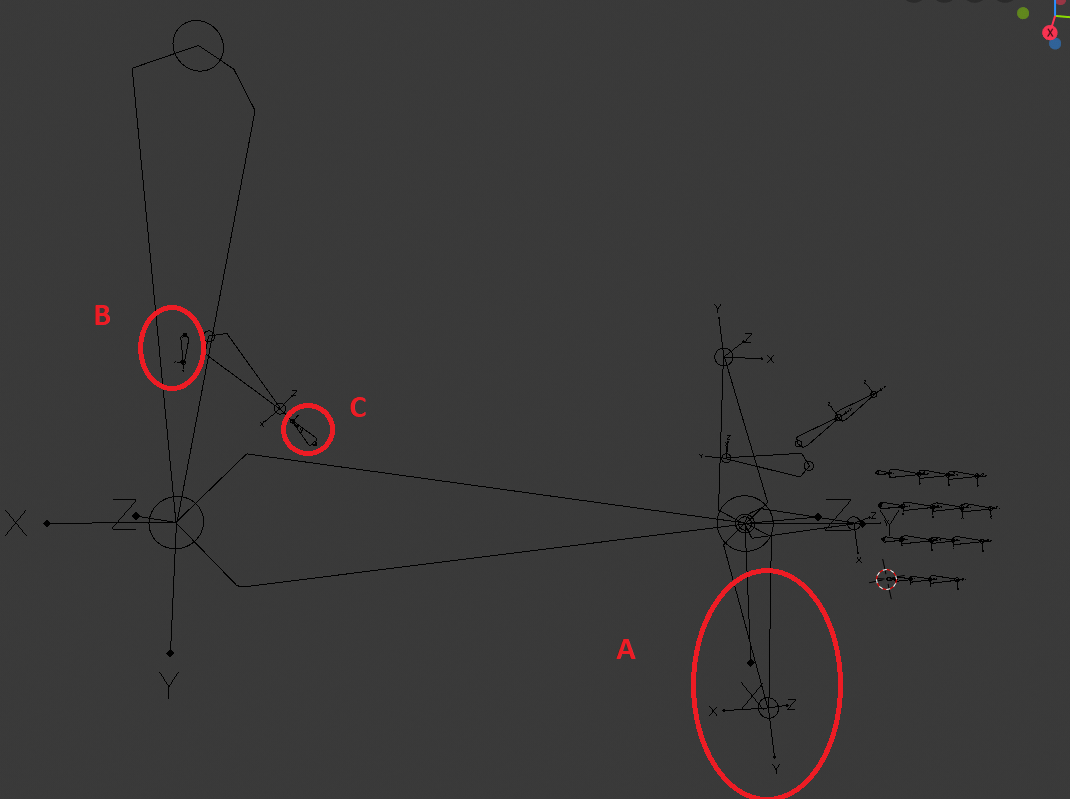
What I try to make is the following: When the arm moves (with I.K. handel (armature A)) and the angle of B (Mesh) gets bigger or smaller, the part of A (mesh) moves up or down. I tried to realise this by using a transformation constraint; when C (armature) rotates, B (armature) moves up or down.
This looks to work until (armature) B moves up to much and it is not aligned with the upper arm any more.
Does someone know how I can make a rig like this working? [I added the Blender file to this forum-post; it seems like this didn't work].
I am also aware that the length of the piston is not correct. I will edit this later.
Thanks!